Allgemeines zur künstliche Intelligenz
Künstliche Intelligenz und damit maschinelles Lernen folgt immer nach der gleichen Reihenfolge:
Daten werden erfasst und aufbereitet. Dies kann in Echtzeit geschehen oder durch das Aggregieren in Datenbanken. Bevor die Daten verwendet werden können, ist in nahezu jedem Anwendungsfall ein Aufbereiten im Zuge des ETL Prozesses notwendig.
Anschließend können die Daten mittels eines Algorithmus der künstlichen Intelligenz und genauer des maschinellen Lernens analysiert werden. In den meisten Fällen dienen diese dazu innerhalb der Daten Merkmalsketten und Muster zu identifizieren. Das konkrete Ziel eines Algorithmus wird maßgeblich davon beeinflusst, welche Art des Lernens zum Einsatz kommt.
Das Ergebnis des Algorithmus wird in einer beliebig gearteten Reaktion ausgedrückt. Dabei kann, wie hier beschrieben, ein Aktor gesteuert werden oder nur eine Systemausgabe erstellt werden. Methoden des bestärkenden Lernens sind meistens so strukturiert, dass die Reaktion des Systems direkt einen neuen Input erschafft.
Input o Algorithmus o Output
Die konkrete Implementierung des Algorithmus ist dabei abhängig von der Art der Daten. Die Bandbreite erstreckt sich dabei von neuronalen Netzen über Regressionsanalysen bis hin zu Markow Modellen. Grundlegend kann zwischen drei Arten des maschinellen Lernens unterschieden werden:
KI in Anwendung
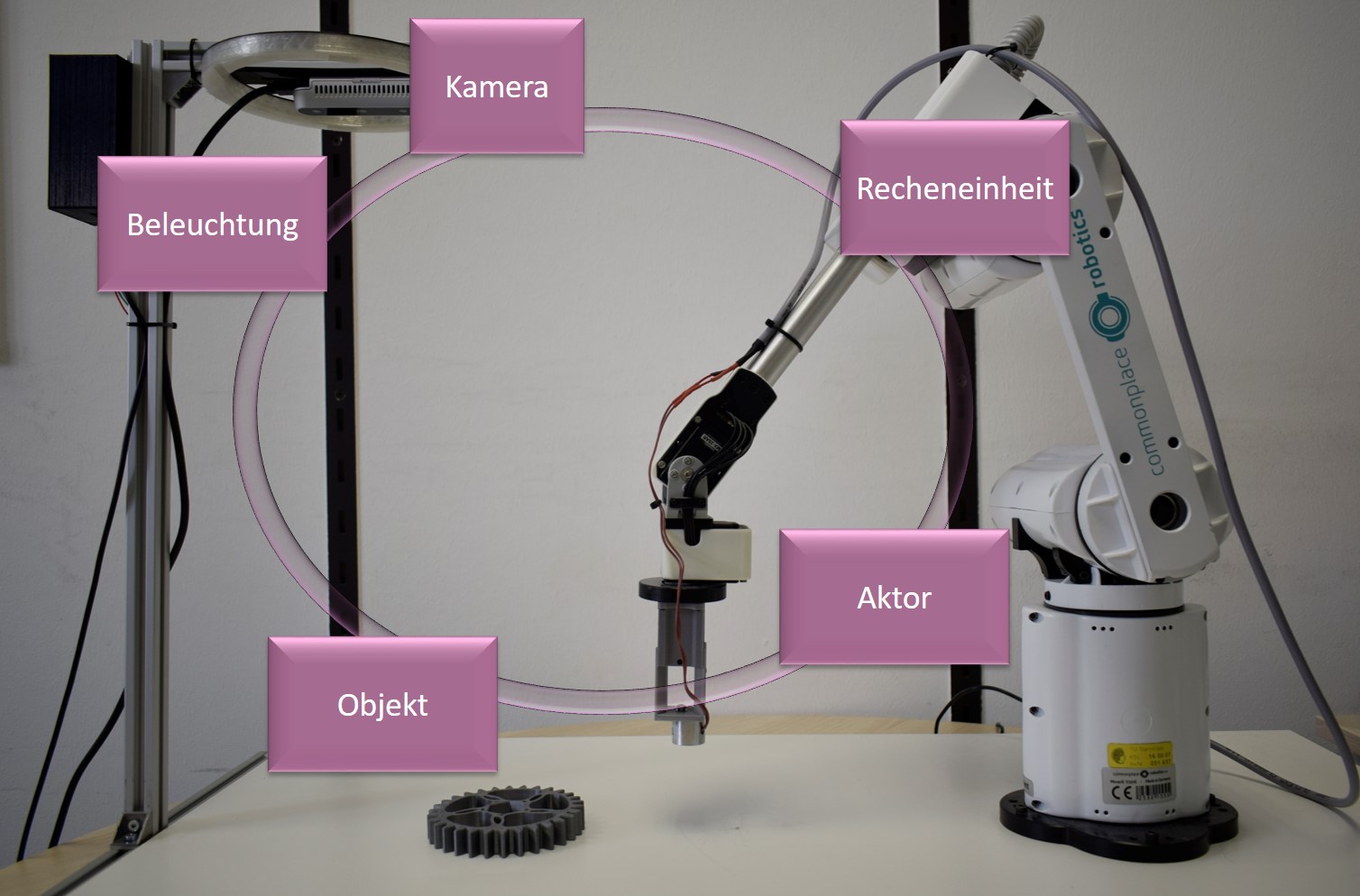
Willkommen zu einem Überblick zu dem Demonstrator „Objekterkennung“. Wie der Name schon andeutet, ist die primäre Aufgabe des Demonstrators Bauteile zu erkennen und weiter diese anschließend automatisch zu sortieren. Dazu besteht er aus drei Hauptkomponenten, sowie weiteren Nebenkomponenten.
Die drei wichtigsten Elemente für den Demonstrator sind der Roboterarm, ein Rechner und das Kamerasystem. Bei dem Roboter handelt es sich um einen Mover6 der Firma Commonplace Robotics. Damit handelt es sich um einen Roboterarm mit 6 Freiheitsgraden. Als Endeffektor dient hierbei ein ansteuerbarer Elektromagnet.
Die Kamera ist eine Realsense D415 der Firma Intel. Diese besitzt keine expliziten Bilderkennungsfunktionen. Die Kamera erfasst kontinuierlich die Situation vor dem Roboterarm und sendet den Videofeed an die Steuereinheit. Ergänzt wird die Kamera um eine Beleuchtung. Der Einfluss auf die Qualität der Bilderkennung durch die Beleuchtung ist sehr gering, solange ein Grundlevel an Helligkeit sichergestellt ist. Auch haben verschiedene Lichtfarben keinen signifikanten Einfluss in diesem Versuchsaufbau.
Auf dem Rechner wird sowohl die Schnittstellensoftware zu dem Roboter, als auch ein neuronales Netz betrieben. Je nachdem mit welchen Daten das Netz trainiert wurde, können unterschiedlich Gegenstände, unterschiedliche gut innerhalb der Bilder erkannt werden. Wird ein Objekt erkannt, wird auch die Raumpositionierung ermittelt. Beide Informationen werden anschließend an den Roboter gesendet, welcher die Gegenstände dann mittels eines Magneten aufnimmt und innerhalb einer definierten Ordnung sortiert.
Datengrundlage
Abschließend noch ein Überblick über die Daten bezüglich des Demonstrators:
Datengrundlage
Zahlen
Anwendungsfall "Greifer":
Unterschiedliche Teile:
18
Bilder pro Teil:
25-50
Bilder gesamt:
800
Trainingsdauer:
5 - 15 min
Höchste Präzision:
98,7 %
Gleichzeitige Objekte:
10
Datenkonfigurator
Willkommen zum Datenkonfigurator. Dieser erlaubt es unterschiedliche Parameter, bezüglich des Trainings, der Aufnahme und der Klassifikation zu testen. Die zugrundeliegenden Daten sind dabei die Daten der beschriebenen Objekterkennung zum automatischen Sortieren von Bauteilen.
Das Szenario ist dabei wie folgt: Ein Roboter ist verbunden mit einer zentralen Steuereinheit, sowie einer Kamera. Bei dem Roboter handelt es sich um einen Mover6 der Firma Commonplace Robotics. Die Kamera ist eine Realsense D415 der Firma Intel. Dementsprechend liegt keine dedizierte Hardware zur Bilderkennung vor. Die Kamera erfasst kontinuierlich die Situation vor dem Roboterarm und sendet den Videofeed an die Steuereinheit. Auf dieser wird sowohl die Schnittstellensoftware zu dem Roboter, als auch ein neuronales Netz betrieben. Je nachdem mit welchen Daten das Netz trainiert wurde, können unterschiedliche Gegenstände unterschiedlich gut innerhalb der Bilder erkannt werden. Wird ein Objekt erkannt, wird auch die Raumpositionierung ermittelt. Beide Informationen werden anschließend an den Roboter gesendet, welcher die Gegenstände dann mittels eines Magneten aufnimmt und sortiert.
Vergleichbare Industrie-Applikationen dazu sind Sortieranlagen, wie zum Beispiel für die Mülltrennung.
Um einen Eindruck vom Einfluss unterschiedlicher Prozessparameter zu erfahren, finden Sie hier einen Konfigurator mit dem Sie unterschiedliche Einstellungen testen können. Indem Sie über die einzelnen Segmente des Objekterkennungskreislaufs gehen, können Sie unterschiedliche Parameter bezüglich der Trainigsdaten und der Validierungsdaten anpassen. Der Button „Kalkulieren“ wird dann eine ungefähre Präzision für diesen Versuchsaufbau ausgeben. Beachten Sie, dass diese Abschätzung eine Individualabschätzung ist und nur in der Tendenz auf andere Anwendungsfälle übertragen werden kann.
Versuchen Sie doch zunächst die essentiellen Stellschrauben zu identifizieren, welche den größten Einfluss auf die Präzision des neuronalen Netzes hatten:
Der Anwendungsfall
Kalkulieren
Ungefähre Präzision:
-Ergebnis-
Welche Daten gibt es?
Welche Datenquellen gibt es im Kontext überwachtes Lernen und was muss mit den Daten geschehen?
Daten werden häufig als das Rohöl des 21. Jahrhundert bezeichnet. Daher widmet dieser Teil sich den unterschiedlichen Arten von Daten, welche es geben kann und die man ins Kalkül ziehen kann, wenn es um die Implementierung von KI in den eigenen Prozessen geht. Im Weiteren wird am Beispiel des Demonstrators auf das Beschriften von Daten, ein essentieller Teil des überwachten Lernens, eingegangen.
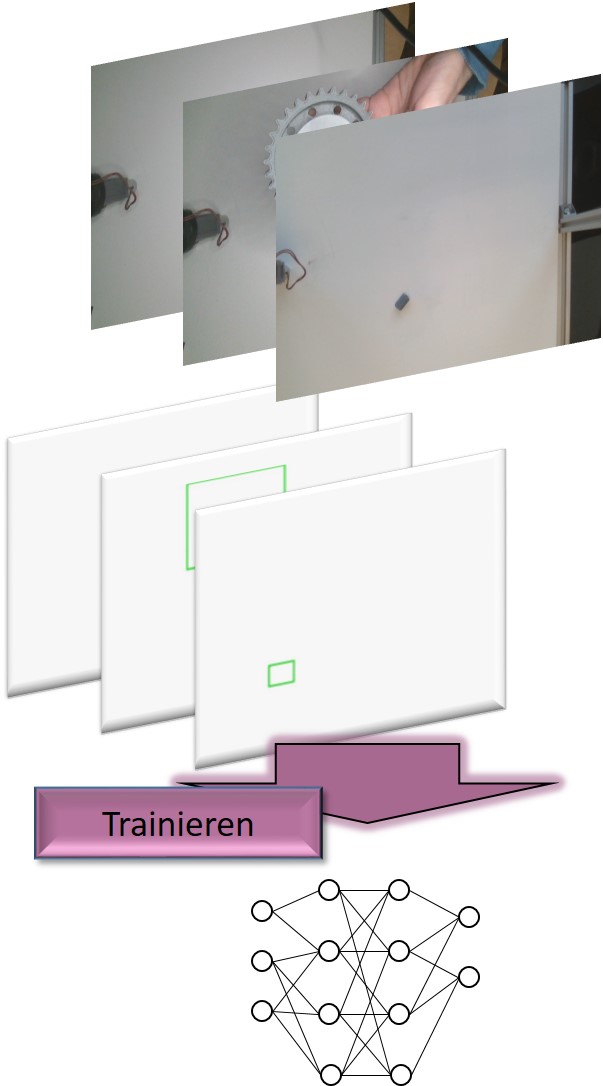
Labeling / Beschriftung
Labeling oder Beschriften beschreibt das Hinzufügen von Metadaten zu einzelnen Datensätzen. Dabei werden Datensätze zu Situationen zusammengefasst. Anschließend werden diese Situationen mit Expertenwissen angereichert, um diese besser beurteilen zu können. Ein konkretes Beispiel hierfür ist das Labeln von Bildern. Zuerst werden Kategorien festgelegt für alle Objekte, die erkannt werden sollen. Anschließend werden auf jedem Bild die Objekte markiert und die jeweilige Kategorie ausgewählt.

Ablauf
Zeitaufwand
Die benötigte Zeit zum Beschriften von Daten kann varieren, eine erste Überschlagsformel lautet wie folgt:

c: Erfahrung des Erstellers:
1 - 2
l: Anzahl der möglichen Label:
5 - 15
r: Verhältnis Objekt / Bild:
0,05 - 0,5
o: Anzahl Objekte pro Bild:
2 - 5
Diese Formel dient nur einer ersten Abschätzung. Die zugrunde liegenden Daten basieren dabei auf Tests mit Studenten an den Daten des beschriebenen Demonstrators.